|
|
|||||||||||||||||
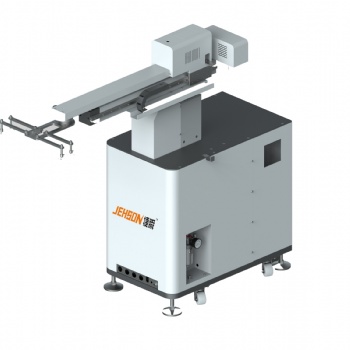
擺臂式機(jī)器人手應(yīng)用范圍:應(yīng)于五金沖壓,拉伸自動(dòng)化;適合用于小批量多樣化行業(yè),亦可應(yīng)用于其他產(chǎn)品平面方向自動(dòng)搬運(yùn),碼垛,上下料等。擺臂式?jīng)_壓機(jī)械手融合了關(guān)節(jié)式?jīng)_壓機(jī)器人的“高自由度”,以及連桿式?jīng)_壓機(jī)械手的“高效穩(wěn)定”的雙重特性,價(jià)格適中、控制比較靈活、使用操作簡(jiǎn)單。擺臂式?jīng)_壓機(jī)械手可代替人的繁重勞動(dòng)以實(shí)現(xiàn)生產(chǎn)的機(jī)械化和自動(dòng)化,能在有害環(huán)境下操作以保護(hù)人身安全,因而廣泛應(yīng)用于機(jī)械制造、冶金、電子、輕工和原子能等部門(mén)。
擺臂式?jīng)_壓機(jī)械手動(dòng)作過(guò)程:從原點(diǎn)開(kāi)始按下啟動(dòng)鍵,下降電磁閥通電,機(jī)械手開(kāi)始平移向外;降,機(jī)械左臂吸盤(pán)通過(guò)真空發(fā)生器把鈑料吸住,將鈑料定位送到?jīng)_床模具上,機(jī)械手離開(kāi)到安全點(diǎn),沖床開(kāi)始沖壓產(chǎn)品;整體來(lái)說(shuō),針對(duì)國(guó)內(nèi)沖壓行業(yè),擺臂沖床機(jī)械手具有較高的實(shí)用性和性?xún)r(jià)比,是自動(dòng)沖壓生產(chǎn)線(xiàn)的理想解決方案。在靈活性、實(shí)用性、使用性、生產(chǎn)效率以及性?xún)r(jià)比上都較為均衡適中。從功能的角度來(lái)看,擺臂式?jīng)_壓機(jī)械手又有一下優(yōu)點(diǎn)。
★通用特性:
1. 機(jī)器人控制器和伺服系統(tǒng),重復(fù)定位精度更高,速度更快,算法精準(zhǔn),運(yùn)動(dòng)平順;實(shí)現(xiàn)快、精、準(zhǔn)的特點(diǎn)高效完成作業(yè),**產(chǎn)品均性。
2.整機(jī)采用品牌配件,核心配件選用進(jìn)口高端產(chǎn)品,使工業(yè)機(jī)器人運(yùn)行高速穩(wěn)定,,耐磨損,使用壽命長(zhǎng).
3采用PLC+觸摸屏,穩(wěn)定性好,操作簡(jiǎn)單,易學(xué)易用,在生產(chǎn)更換產(chǎn)品重新編程時(shí),可在**短時(shí)間內(nèi)完成,省時(shí)高效.獨(dú)有升降、擺動(dòng)、伸縮結(jié)構(gòu)創(chuàng)新技術(shù),運(yùn)動(dòng)更加穩(wěn)定
n 4.公司具有1項(xiàng)發(fā)明、5項(xiàng)實(shí)用、1項(xiàng)軟著,全面技術(shù)支撐
n 5通用性強(qiáng):上料機(jī)與夾具均可按客戶(hù)要求進(jìn)行通用性設(shè)計(jì),實(shí)現(xiàn)多種工件的兼容性,不僅滿(mǎn)足“小品種大批量”工件的自動(dòng)化沖壓要求,亦適用于“多品種小批量”的應(yīng)用要求;
n 6.系列產(chǎn)品可解決3㎏~10㎏范圍內(nèi)任何形狀、任何工藝要求的沖壓件的自動(dòng)化生產(chǎn),是專(zhuān)業(yè)解決沖壓自動(dòng)化的**成果,本產(chǎn)品應(yīng)用于沖壓行業(yè)代替人工實(shí)現(xiàn)上下料和工件轉(zhuǎn)移,廣泛應(yīng)用于家電、汽車(chē)、3C等沖壓領(lǐng)域
|
型 號(hào) 參 數(shù) |
JS-R4-06L |
JS-R4-06H |
JS-R4-10 |
|
|
整機(jī)尺寸(長(zhǎng)*寬*高) |
860*500*1360mm |
860*500*1530mm |
950*600*1950mm |
|
|
運(yùn) 動(dòng) 行 程 |
擺臂上下升降行程 |
0-250mm |
0-350mm |
0-350mm |
|
擺臂前后伸縮行程 |
0-650mm |
0-650mm |
0-900mm |
|
|
擺臂旋轉(zhuǎn)角度 |
270° |
270° |
270° |
|
|
夾手吸盤(pán)旋轉(zhuǎn)角度 |
270° |
270° |
270° |
|
|
**工作半徑(mm) |
1100mm |
1300mm |
1500mm |
|
|
手臂**吸取重量(kg) |
≦6kg |
≦6kg |
≦10kg |
|
|
整機(jī)功率(kw) |
2.5kw |
3.5kw |
5.5kw |
|
|
生產(chǎn)效率(PCS/M) |
12-15 |
10-14 |
8-12 |
|
|
整機(jī)重量(kg) |
380 |
400 |
450 |
|
|
耗電量(kw/h) |
1 |
1.4 |
2 |
|
|
氣壓(Mpa) |
0.5 |
|||
|
工作環(huán)境 |
-5—40℃ |
|||
|
送料精度(mm) |
±0.2 |
|||
|
控制方式 |
AC控制系統(tǒng) |
|||
|
