|
|
|||||||||||||||||
產品組成:
清除泥餅蛇形機器人是一種針對盾構機等設備內泥餅清理的特殊機器人,通常由以下部分組成:
1.機械本體;2.驅動系統(tǒng);3.感知系統(tǒng);4.清理系統(tǒng);5.控制系統(tǒng);6.輔助系統(tǒng)
適用范圍:
用于盾構機刀盤泥餅的沖刷清理,還可通過機械臂攜帶的相機檢查刀盤狀況,具備探傷檢驗、焊接、切割等技術集成能力,實現(xiàn)刀盤的多功能檢修維保。
產品優(yōu)勢:
1.遙控操作三維虛擬仿真平臺
2.精準視覺定位與仿真模擬定位
3.EtherCAT工業(yè)互聯(lián)網實現(xiàn)伺服電機聯(lián)動技術
工作原理
運動原理:
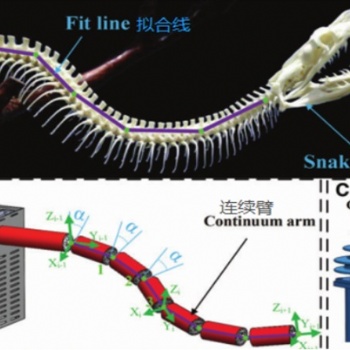
蛇形機器人的設計使其能夠在狹小的井壁空間內靈活運動。它由多個關節(jié)連接而成,每個關節(jié)都有獨立的驅動裝置。驅動關節(jié)的電機或驅動器按照一定的順序和力度進行工作,使機器人能夠沿著井壁前進、后退、轉彎等,從而到達需要清除泥餅的位置。其身體表面有特殊附著裝置,增強與井壁之間的摩擦力,防止在運動過程中滑落,確保穩(wěn)定地在垂直或傾斜的井壁環(huán)境中移動。
泥餅清除原理:
機械刮削:機器人身上配備有專門的刮削工具,當機器人在井壁上運動時,刮刀與泥餅表面接觸,通過機器人的運動將泥餅從井壁上刮除。
高壓水射流清洗:通過高速水流的強大沖擊力,將泥餅擊碎并沖刷掉。水射流的壓力和流量可以根據(jù)泥餅的硬度、厚度等特性進行調節(jié)。
化學溶解:機器人還可以攜帶或釋放能夠溶解泥餅的材料,使泥餅結構變得疏松,更容易被刮削或沖刷掉。
控制與監(jiān)測原理:
遠程控制:操作人員在地面通過有線或無線通信方式對蛇形機器人進行控制。控制指令包括機器人的運動方向、速度,以及清除泥餅工具的操作等。
狀態(tài)監(jiān)測:機器人自身搭載有各種傳感器,用于監(jiān)測自身的狀態(tài)和工作環(huán)境。
|
